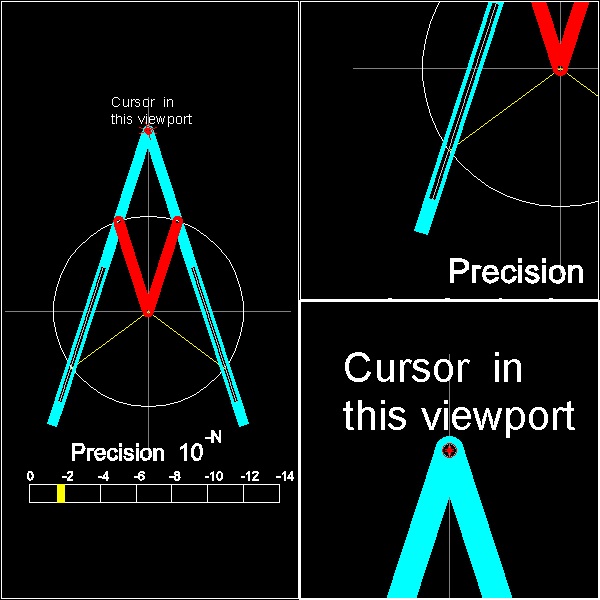
チェバのパントグラフを下図に示す。
チェバ(Tommaso Ceva, 1648-1737)
はイタリアのイエズス会士で幾何学、重力、数学を研究していた。
彼の兄(Giovanni Ceva, 1647-1734)
はチェバの定理(Ceva's Theorem)やメネラウスの定理(Menelaus' Theorem)の
再発見と出版で知れれている。
三等分する角を∠AOBとする。
点O は固定点で、点P は線分PO に沿って移動。
PR = PS = RO = SO。点R と点S は円に沿って移動する。
線分PR の延長線が点A を通るとき ∠AOB は三等分される。
*********** pantograph_desc.dwg ***********
この図面とアニメーションの作成方法:
プログラム pantograph.lsp を (load "pantograph") でロードする。
次にコマンド ラインから pantograph と実行命令をタイプする。
この機構の動作を見るには test_pantograph と実行命令をタイプする。
プログラムを実行すると3つのビューポートが現れる。 プログラムはビューポート内のカーソルの動きにそって、頂点P が中央にくるように描画する。
*********** pantograph_note.dwg ***********
下図に示すように、チェバのパントグラフに関するアイデアは簡単な3つの棒リンクからきている。
棒EP とFP の長さは距離CE に等しい。
棒CF には細い溝が切られており、点F が線分CF に沿って
自由に移動できるようになっている。
アルキメデスの挿入法とこの図を比較すると、
∠PCF は常に∠DPF の3分の1であることが容易に判る。
*********** 3bars_apparatus.dwg ***********
この図面とアニメーションの作成方法:
プログラム link_Ceva1.lsp を (load "link_Ceva1") でロードする。
次にコマンド ラインから link_Ceva1 と実行命令をタイプする。
この機構の動作を見るには test_Ceva1 と実行命令をタイプする。
アニメーションファイルの作成:animation_link_ceva1
上記チェバの3本棒の仕掛けを逆さにし、点O を円の中心とすると、これも角の三等分ツールとして使える。
PS, SO, OA は同じ距離である。
∠AOBは、棒PT の中心線が円上の点A を通り、
S が円周上, P がOB野延長線上に来た時に三等分される。
*********** 3bars_apparatus_2.dwg ***********
この図面とアニメーションの作成方法:
プログラム link_Ceva2.lsp を (load "link_Ceva2") でロードする。
次にコマンド ラインから link_Ceva2 と実行命令をタイプする。
この機構の動作を見るには test_Ceva2 と実行命令をタイプする。
1. Yates,Robert Carl:"The Trisection Problem", pp 34-35.
質問、問い合わせは 筆者 岩本 卓也宛てにお願いします。
Last Updated Nov 22, 2006
Copyright 2006 Takaya Iwamoto All rights reserved.
{kind=link}
{kind=link}
{kind=link}